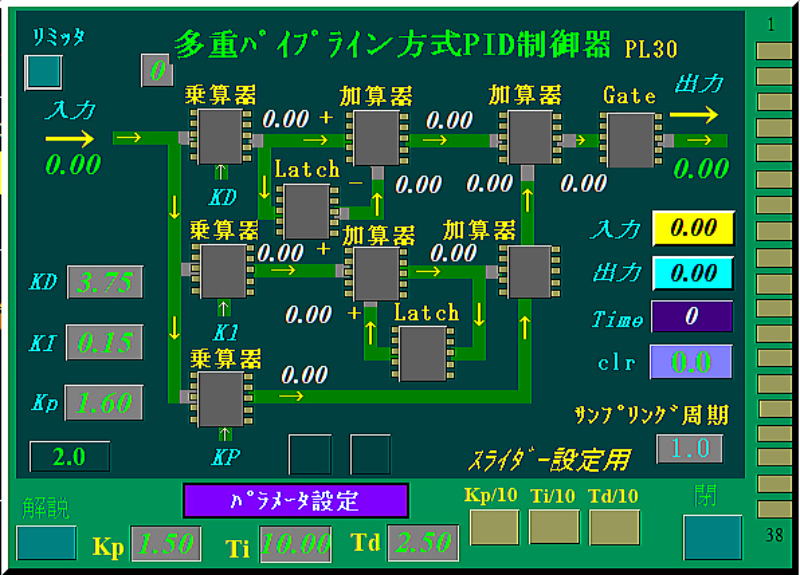
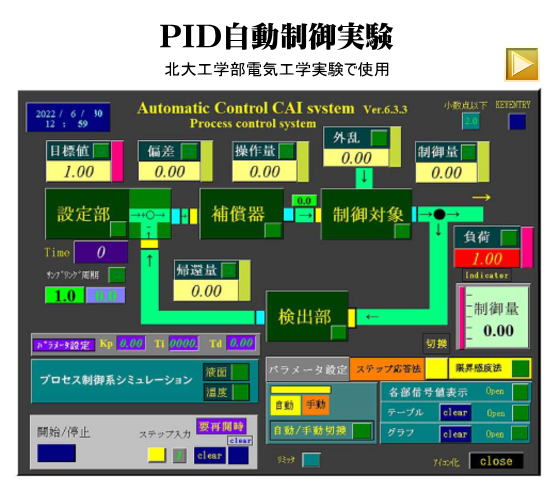
Kp
(比例ゲイン)、
Ti
(積分時間)、
Td
(微分時間)の各パラメータが適正であれば、
過渡特性が優れ、「
目標値
」と「
制御量
」が一致「
偏差がゼロ
」するように動作します。
ご意見・ご質問など
お問い合わせ
PID自動制御CAIシステム
作者 石川 栄一宛
Auxiliary Menu
制御系CAIシステム Windows版
制御系CAIシステム Macintosh版
IntelligentPad用アプリのDL数
(
Vector
)
作者・管理人室
Web Site管理者宛メール