|
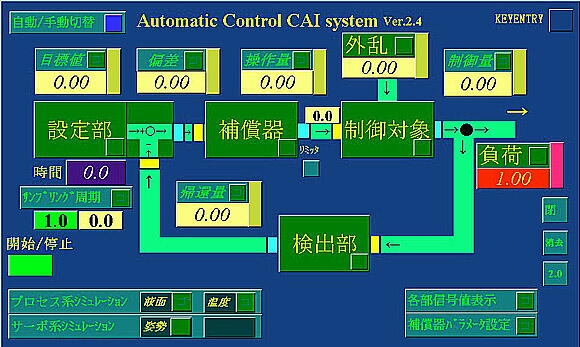
今回の制御系CAIには「温度制御系」パッドを追加しました。制御対象を変えても従来の「液面制御系」と同様な応答が得られることが分かります。
「使用法」
1.パラメータの設定
PID補償器(基本として登録してある)の場合、「補償器」アイコンと「パラメータ設定」アイコンをクリックし、 ジーグラ.ニコルスの限界感度法にてパラメータを設定します。
◎ジーグラ.ニコルスの限界感度法
-----------------------------------------------------------
PID補償器をP動作とし(Ti=∞,Td=0),持続振動が始まるまでKpを(本制御系CAIシステムの 場合は「1刻み」)で増加させ、持続振動の時(安定限界)のゲイン(Kc)と周期(Pc)を求めます。
-----------------------------------------------------------
まず、負荷を最大の「1」に設定します(つまり「無駄時間+1次遅れ要素」に近似します)。次に「補償器」パッドを開き「Ti」および「Td」にゼロを入力します。
CAIパッド下部に貼り付けてある「パラメータ設定」パッドアイコンをクリックして開きます。
「Kc」の値を「1刻み」で増加させてゆき、そのつど「開始/停止」ボタンをクリックしてパラメータ設定のための応答を調べます。
持続振動の状態になったときの、PID動作のパラメータは「Kp」「Ti」「Td」の各値、PI動作は「Kp」「Ti」の各値およびP動作は「Kp」の値が各動作におけるパラメータになります。このように本制御系CAIシステムでは、パラメータ設定パッドにて自動的に決定されます。決定された、PID、
PI、P動作の各パラメータを、各動作に対応した補償器パッドのパラメータ入力スロット(KP,Ti,Td)に設定します。
◎なお、本制御系CAIでは初期値として、サンプリング間隔1秒における適当なパラメータを設定してありますのでCAIシステム左下の「開始/停止」ボタンをクリックしますとサンプリング周期「1秒」の場合のシミュレーションを即座に実行できます。
2.シミュレーション
制御系CAIシステム下部の「プロセス系シミュレーション」の「液面」制御パッドアイコンまたは「温度」制御パッドアイコンをダブルクリックすると、液面制御あるいは温度制御のシミュレーションを行うことができます。この場合、目標値は「0」から「1」の範囲で設定してください。
再度「開始/停止」ボタンをクリックするとサンプリング周期が「0」になり、各制御系のシミュレーションは停止します。なお、オーバーシュートする場合は「Kp」の値を0.1刻みで小さくするなどして微調整してください。
「リミッタ」ボタンをクリックし「黄色」の状態にしますと、マイナス(-)の操作量が出力されないので実際に近い状態でシュミレーションを行うことができます。
3.各部信号値表示
制御系CAIシステム右下の「各部信号値表示」アイコンをクリックしますと、各要素の信号をグラフで確かめることができます。目標値を変える場合は、数値パッドに直接、値を入力するかスライダの適当な位置をクリックします。
4.制御対象パッド
「制御対象」パッドでは、無駄時間、感度を自由に可変できますので、適当に変えてシミュレーションを行うことができます。その場合、「パラメータ」設定パッドにて再度、最適なパラメータを決定しなければなりません。またプログラムを変えることにより、高次遅れ要素など様々な要素のシミュレーションも可能です。
5.補償器
補償器は、PID補償器に限らず、プログラムを変更すると、他の補償器としてのシミュレーションを行うことができます。
(補足)「温度制御のシミュレーション」
本システムでは「目標値*100」が制御量となるようにしてあります。負荷に設けてあるスライダーの値を変化させますと、制御対象の伝達関数が変わり応答も変化します。再度「開始/停止」ボタンをクリックしますとサンプリング周期が「0」になり温度制御系のフィードバック自動制御のシミュレーションは停止します。
「手動制御」
目標値を「0」から「1」の範囲で設定し、本制御系CAIシステム左上の「自動/手動切替」パッドアイコンをダブルクリックしますと「自動/手動」パッドが開きます。スイッチパッドをクリックし自動(黄色)から手動(ピンク色)に切り替えます。
次に「開始/停止」ボタンをクリックしますと手動制御を行うことができます。操作量は、手動操作量の横スライダをクリックするか、数値パッドに直接値を設定します。「目標値=制御量」になれば完璧です。「外乱」あるいは「負荷」を適当に変化させながら手動制御のシミュレーションを行ってください。
「格納場所」
まず、本システム「CAIWIN22.LZH」をLHAで解凍してください。
制御系CAIシステム(CAIWIN22.PAD)の格納場所は、
>IPAD\USR\SAVEPADS\
です。
「Ver.1.1からの改善点」
1.アイコンをカスタマイズしました。したがって、各部の「ブロック」や「信号値名」をダブルクリックしますと目的のパッドが開きます。
2.「開始/停止」ボタンを新設しましたので、シミュレーションを行う際の操作がたいへん便利になったと思います。同時に停止した場合は全ての値を初期化(クリア)するようにしました。ただし目標値および外乱および負荷はクリアしません。
補償器や制御対象などに初期値を入力したい場合は、それぞれのパッドのスロットから入力してください。
3.プロセス系パッドは、よりリアルにしました。
「Ver.1.2からの改善点」
「自動制御系CAIシステム Ver.1.2」のアイコンを改良するとともに、アイコン用BMPファイルの使用をやめて、本CAIシステムがどこのディレクトリにあっても正常な動作を可能にしました。各部の「ブロック」や「信号値名」に貼り付けてあるボタン型のアイコンをダブルクリックしますと目的のパッドが開きます。
「Ver.1.21からの改善点」
1.「温度制御系」パッドを設けました。
2.操作量の出力にマイナスが出力されないようリミッタを設け、切り替え可能としました。
3.負荷を加えれるようにしました。これにより負荷の変動に対する応答を調べることができます。
4.制御対象の伝達関数は、負荷が「1」の時は「1次遅れと無駄時間」要素に、負荷が「0」の時は「積分と無駄時間」要素に近似しております。
5.IntelligentPad Ver.1.0とIntelligentPad Ver.2.0どちらでも問題なく動作するように改良しました。
「注意」
使用フォントは、MS明朝の他に標準明朝およびTimes New Romanをインストールしてください。
北海道大学 石川 栄一
|